We are a team of researchers and software developers focused on flexible, intelligent, and trustworthy autonomy.
We leverage techniques from formal methods, control theory, and robotics to develop algorithms for autonomous
systems with safety guarantees. Our work starts with fundamental theory and delivers prototypes operating
in the real world. Please take a look at our publications below and check out our software on GitHub.
Leahy, K., Serlin, Z., Vasile, C.-I., Schoer, A., Jones, A., Tron, R., and Belta, C. “Scalable and Robust Algorithms for Task-based Coordination from High-level Specifications (ScRATCHeS)” IEEE Transactions on Robotics, 38(4):2516-2535, 2022.
Cohen, M., Serlin, Z., Leahy, K., and Belta, C. “Temporal Logic Guided Safe Model-Based Reinforcement Learning: A Hybrid Systems Approach.” Nonlinear Analysis: Hybrid Systems, 47, 2023.
Cai, M., Leahy, K., Serlin, Z., and Vasile, C.-I. “Probabilistic Coordination of Heterogeneous Teams from Capability Temporal Logic Specifications.” IEEE Robotics and Automation Letters, 7(2):1190–1197, 2022.
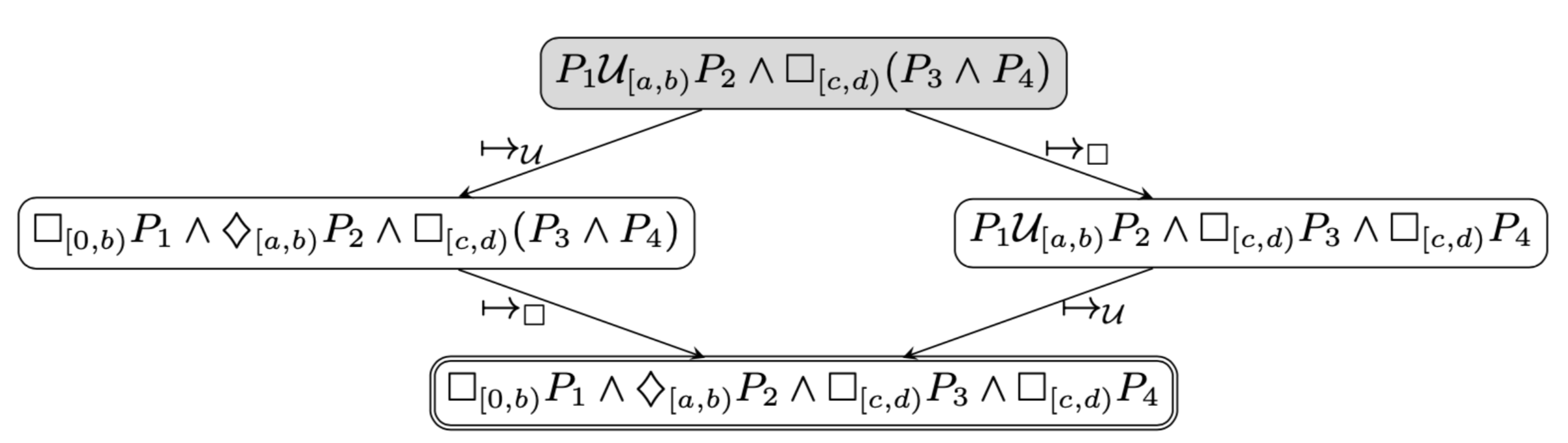
Leahy, K., Mann, M., and Vasile, C.-I. “Rewrite-Based Decomposition of Signal Temporal Logic Specifications.” In NASA Formal Methods, Texas, United States, 2023.
Liu, W., Leahy, K., Serlin, Z., and Belta, C. “Robust Multi-Agent Coordination from CaTL+ Specifications.” In American Control Conference (ACC), California, United States, 2023.
Cai, M. Mann, M., Serlin, Z., Leahy, K., and Vasile, C.-I. “Learning Minimally-Violating Continuous Control for Infeasible Linear Temporal Logic
Specifications.” In American Control Conference (ACC), California, United States, 2023